SetupGuide Schritt für Schritt
(basiert auf 2016-03-18 Raspbian Jessie, letzte Aktualisierung 06. Februar 2017, ZWO ASI120MC-S ergänzt)
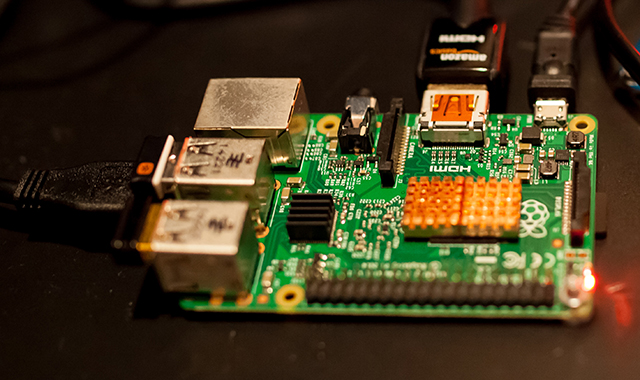
Hier beschreibe ich euch, wie ihr einen kleinen Raspberry Pi als Autoguider nutzen könnt und somit euer Laptop/PC im Wohnzimmer bleiben kann. Zwar werden jetzt viele sagen: "Wozu das ganze? Es gibt doch schon den MGEN!" aber der kleine Raspberry hat den Vorteill, dass ihr deutlich empfindlichere Guiding-Kameras nutzen könnt und z.B. bei einem OAG die Leitsternsuche einfacher wird als mit dem MGEN. Mit einem kleinen 80mm Refraktor mit 400mm Brennweite und meiner Alccd5.2 sind Sterne mit einer Helligkeit von lediglich 10 mag als Leitsterne nutzbar.
Wie ihr den Equipment-Angaben unter meinen Bildern entnehmen könnt, nutze ich den Raspberry Pi seit 2014 als Autoguider/Standaloneguider in meinem Powertank mit durchweg positiven Erfahrungen, daher auch hier die Aktualisierung der Anleitung auf den aktuellen Hard- und Softwarestand! Falls ihr noch einen Raspberry Pi 2 oder ein Model B ungenutzt herumliegen habt, findet ihr hier die Anleitung für die älteren Modelle.
Kleiner Hinweis:
Da diese Anleitung auf 2016-03-18 Raspbian Jessie beruht, kann es durchaus sein, dass zukünftig einige der Downloadbefehle nicht funktionieren. In diesem Fall hilft euch aber die Suchmaschine eures Vertrauens weiter, sucht nach dem entsprechenden Paket und ersetzt dann die Linkadresse im Befehl. Diese Schritt-für-Schritt-Anleitung habe während der Einrichtung meines Raspberry Pi 3 Model B erstellt.
Im Gegensatz zu den CCD-Treibern, die ich in der ersten Version verwendet habe (auf dem Raspberry Pi 2) funktioniert der neue Treiber mit der QHY6 deutlich besser. Die Darkabzüge im lin_guider sind auch solche und das Bild ist trotz aller Signalverstärkungen klar und der Hintergrund schwarz, das war bei den alten Treibern leider nicht immer so. Angenehmer Nebeneffekt, der lin_guider liest die Hardwaredaten des Sensors automatisch aus und verwendet diese, so dass ihr nur noch die Daten eures Leitrohrs händisch eingeben müsst.
1. SD-Karte mit Raspbian-Image erstellen:
Grundlage für diese Schritt für Schritt Anleitung ist das Raspbian-Image mit dem Veröffentlichungsdatum 2016-03-18 „Raspbian Jessie“. Um Speicherproblemen aus dem Weg zu gehen, solltet ihr zu einer 8GB-SD-Karte greifen, aufgrund der aktuellen Speicherkartenpreise würde ich aber eher zu einer 32GB-Karte raten. Auf einer solchen Karte habt ihr genug freien Speicher um die ein oder andere Erweiterung zu installieren und ggf. auch mal ein Bild direkt auf dem Pi zu speichern.
Da ich die SD-Karte für den Raspberry Pi unter Windows erstellt habe, musste ich vorher noch ein kleines Tool herunterladen um das entsprechende Image auf eine bootbare SD-Karte zu schreiben. Entschieden habe ich mich für den Win32 DiskImager, einfach die Suchmaschine Eures vertrauens mit „Win32 DiskImager“ füttern, dann bekommt ihr entsprechende Donwloadlinks. Das heruntergeladene Zip-Archiv entpacken und die Win32DiskImager.exe ausführen, denn dieses kleine Tool muss nicht installiert werden.
Im DiskImager unter „Device“ die SD-Karte auswählen und unter „Image File“ das entsprechend heruntergeladene Image für den Raspberry Pi. Anschließend noch auf „write“ klicken und in ein paar Minuten ist das Image auf der SD-Karte.
Die so geschriebene SD-Karte kann nun im Raspberry Pi verwendet werden. Die Konfiguration per Konsole, wie ich sie in meinem ersten Tutorial zu diesem Thema geschrieben habe entfällt beim Raspbian Jessie, stattdessen wird direkt bis auf den Desktop gebootet und ihr könnt komfortabel mit der Maus alles Notwendige zusammenklicken.
Um das Betriebssystem auf Deutsch umzustellen und auch den Tastaturtreiber an das landesübliche Layout anzupassen klickt ihr unter Menu auf Preferences und dann auf Raspberry Pi Configuration. In dem sich nun öffnenden Dialogfenster könnt ihr den Pi auf eure Bedürfnisse zuschneiden. Standardmäßig ist SSH aktiviert (was ich pers. auch gut finde), wenn ihr dafür aber keinen Bedarf habt, schaltet es besser aus. Wenn ihr alle Einstellungen vorgenommen habt und den Dialog schließen wollt, will das System neu starten, was ihr auch bestätigt.
Ein der größten Vorteile des Raspberry Pi 3 model b ist der WLAN-Chipsatz. Wo man sich bei den Vorgängermodellen noch lange im Netz schlau machen musste, welcher USB-WLAN-Dongle überhaupt raspberrytauglich ist, hat man nun einen solchen Chip von Anfang funktionsbereit zur Verfügung.
Da sich der Raspberry Pi standardmäßig per DHCP die aktuelle Netzwerkkonfiguration vom Router holt, sollte auch eine Verbindung zum Internet bestehen. Das ganze lässt sich sehr einfach auf der Konsole mit einem Ping überprüfen:
ping www.heise.de
sollte mit einer Antwort des Heise-Servers reagieren. Der Befehl lässt sich unter Linux mit der Tastenkombination STRG+C abbrechen, da er im Gegensatz zum Windows-Ping nicht automatisch nach 5 Versuchen abbricht.
Falls die Verbindung ins Internet fehlschlagen sollte, müsst ihr die Netzwerkeinstellungen des Routers und des Raspberry Pi überprüfen. Wie das funktioniert ist im Internet ausführlich dokumentiert und sollte niemanden vor ernsthafte Probleme stellen.
Als nächstes solltet ihr nun noch das Passwort vom Standarduser pi ändern, das per Default auf raspberry gesetzt ist.
Geändert wird das Passwort am einfachsten auf einer kleinen Konsole mit dem Befehl:
passwd pi
Raspbian Jessie ist auf 2gb-Karten ausgelegt, daher wird auch anfangs nur dieser Speicherplatz für das Betriebssytem verfügbar gemacht. Ehe ihr also anfangt Software zu installieren solltet ihr auch das Dateisystem entsprechend der Kartengröße erweitern, sonst reicht der Speicher nicht einmal zum Download der Guider-Software und der benötigten Bibliotheken!
Die Partitionsgrößen lassen sich unter Linux zwar auch von Hand recht komfortabel ändern, einfacher ist es aber mit den Boardmitteln von Raspbian.
Öffnet eine Konsole und mit:
sudo raspi-config
landet ihr im Konfigurator für das Betriebssystem und könnt hier auch das Dateisystem an die SD-Karte anpassen. Der erste Punkt in diesem Dialogfenster ist „expand filesystem“, den ihr mit Return anwählt. Durch das Menü lässt sich mit den Pfeiltasten bzw. der Tab-Taste navigieren.
2. Midnight-Commander installieren:
Da ich ein großer Freund des Midnight-Commander bin, war dieses kleine Tool auch das erste, was ich nachinstallieren musste.
sudo apt-get install mc
installiert den MC, mit dem das Datei-Browsing und Editieren von Dateien zum Kinderspiel wird.
3. Lin_Guider installieren:
Um den Lin_Guider sauber zum Laufen zu bringen, müssen zuerst ein paar Libraries und das „Linux Hotplug Project“ fxload installiert werden.
Hier die Befehle:
sudo apt-get install libusb-1.0-0-dev
sudo apt-get install libqt4-dev
sudo apt-get install libftdi-dev
sudo apt-get install libxtst-dev build-essential libqt4-dev qt4-qmake
sudo apt-get install fxload
Falls einer der Befehle wider Erwarten mit einer Fehlermeldung abgebrochen werden sollte, folgt den Anweisungen auf der Konsole oder macht ein Update mit sudo apt-get update. Der Update-Befehl sollte aber das letzte Mittel sein, denn es kann sein, dass damit andere Geräte nicht mehr funktionieren… Mit den hier beschriebenen Programm-/Betriebssystemversionen kommt es aber zu keiner Fehlermeldung!
Als nächstes ladet ihr euch den Lin_Guider selbst herunter. Für diese Anleitung habe ich die derzeit aktuellste Version 3.2.2 verwendet und das Archiv trägt den Namen „lin_guider-3.2.2.tar.bz2“
Heruntergeladen werden kann das Programm bei Sourceforge.
wget http://downloads.sourceforge.net/project/linguider/3.2.2/lin_guider-3.2.2.tar.bz2
Sofern kein anderer Pfad angegeben wurde, landet der Download in eurem Homeverzeichnis und sollte ohne weitere Pfadangaben von einer frischen Konsole aus erreichbar sein.
Entpackt wird das Archiv linuxüblich mit:
tar -xvf lin_guider-3.2.2.tar.bz2
Anschließend in das Lin_guider-Verzeichnis wechseln
cd lin_guider_pack
cd lin_guider
Kompiliert wird das Ganze dann mit:
./configure
und
make
Das Kompilieren kann ein wenig dauern, ist aber deutlich schneller als bei den Vorgänger-Modellen!
4. CCD-Treiber bzw. Firmware installieren:
Man kann zwar einzelne CCDs nachinstallieren, da ich aber bei meiner Suche im Netz direkt auf eine Quelle für die gängigsten Kameras gestoßen bin, war ich nicht sonderlich wählerisch und habe diese installiert (beinhaltet die Treiber/Firmware der vom Lin_Guider unterstützten Kameras).
Heruntergeladen habe ich bei Sourceforge die Datei: „firmware-ccd_1.3_all.deb“ und in meinem Homeverzeichnis abgelegt.
wget http://downloads.sourceforge.net/project/cccd/firmware/firmware-ccd_1.3_all.deb
Mit:
sudo dpkg -i firmware-ccd_1.3_all.deb
installiert ihr die CCD-Treiber/Firmwares. Anschließend die Treiber/Firmware noch fürs System verfügbar machen mit:
sudo apt-get install libxtst-dev build-essential libqt4-dev qt4-qmake
und beim nächsten Aufruf des Lin_Guiders sollte alles wie geplant zur Verfügung stehen.
Sofern ihr noch keinen Softlink auf euren Desktop gelegt habt, kopiert einfach die Datei Lin_Guider aus /lin_guider_pack/lin_guider/ auf euren Desktop. Mit einem Doppelklick lässt sich das Programm nun starten.
5. Lin_Guider updaten
Als erstes ladet ihr euch den Lin_Guider in der aktuellen Version herunter. Für die Update-Anleitung habe ich die Version3.3.0 verwendet und das Archiv trägt den Namen „lin_guider-3.3.0.tar.bz2“
Heruntergeladen kann das Programm bei Sourceforge. Die Suchbegriffe „Sourceforge lin_guider“ sollten euch entsprechende Links zum aktuellen Download liefern.
wget http://downloads.sourceforge.net/project/linguider/3.3.0/lin_guider-3.3.0.tar.bz2
Bei dieser Version müssen die benötigten Pakete (siehe 4. Lin_Guider installieren) noch nicht aktualisiert werden, so dass direkt die neue Version entpackt und kompiliert werden kann. Sofern kein anderer Pfad angegeben wurde, landet der Download in eurem Homeverzeichnis und sollte ohne weitere Pfadangaben von einer frischen Konsole aus erreichbar sein.
Entpackt wird das Archiv Linux üblich mit:
tar -xvf lin_guider-3.3.0.tar.bz2
Sofern keine anderen Pfade gewählt wurden, wechselt mit:
cd lin_guider_pack
cd lin_guider
in das root-Verzeichnis des entpackten Lin_Guiders. Kompiliert wird das Ganze dann abschließend mit:
./build.sh
Wie lange das ganze nun dauert wisst ihr ja noch von der Installation…
Bisher wurden alle meine Einstellungen auch vom Update übernommen, so dass der Lin_Guider auch nach dem Update sofort wieder einsatzbereit ist.
6. VNC-Server installieren
Einen VNC-Srever solltet ihr nur installieren, wenn ihr den Raspberry Pi auch fernbedienen wollt. Verbleibt der Raspberry Pi permanent in einem Powertank oder einer Sternwarte und hat einen Monitoranschluss, Tastaur und Maus, könnt ihr euch den VNC-Server auch sparen.
Als erstes wird der TightVNCServer installiert:
sudo apt-get install tightvncserver
Mit vncpasswd sollte nun ein Passwort für die Benutzung des VNC-Servers gesetzt werden.
Starten lässt sich der VNC-Server mit: vncserver :1
Und beenden mit: vncserver -kill :1
Unter Windows lässt sich dann eine VNC-Verbindung mit unterschiedlichen Programmen aufbauen, ich nutze dazu: mRemoteNG
7. ZWO ASI120MC-S installieren

Nachdem ich die ZWO ASI120MC-S schon erfolgreich mit dem lin_guider auf meinem Raspberry Pi 2b "verbunden" habe, war es nur noch eine Frage der Zeit, das Vorgehen aus dem Guide "Raspberry Pi (1-2) als Autoguider" auch auf einem Raspberry Pi 3 zu testen und ja, es funktioniert!
Als erstes ladet ihr euch den Lin_Guider in der aktuellen Version herunter. Für diese Anleitung habe ich die Version 4.1.1 verwendet und das Archiv trägt den Namen „lin_guider-4.1.1.tar.bz2“
wget http://downloads.sourceforge.net/project/linguider/4.1.1/lin_guider-4.1.1.tar.bz2
Entpackt wird das Archiv Linux üblich mit:
tar -xvf lin_guider-4.1.1.tar.bz2
Sofern keine anderen Pfade gewählt wurden, wechselt mit:
cd lin_guider_pack
cd lin_guider
in das root-Verzeichnis des entpackten Lin_Guiders. Kompiliert wird das Ganze dann abschließend mit:
./build.sh
Anschließend benötigt ihr noch das libasicamera-Archiv. Heruntergeladen wird es mit:
wget https://downloads.sourceforge.net/project/linguider/asi_sdk/lg_4.0.0/libasicamera-0.3.0623-armhf.deb
anschließend müsst ihr das Archiv installieren mit:
sudo dpkg -i libasicamera-0.3.0623-armhf.deb
und schließlich könnt ihr mit:
sudo dpkg -l | grep 'libasicamera'
prüfen, ob das libasicamera-Archiv auch sauber installiert wurde. Nun noch den Raspberry Pi neu starten und schon sollte eure ZWO ASI120MC-S im lin_guider funktionieren!
Viel Spass mit dem kleinen Autoguider!

Fragen oder Anregungen? Schickt mir ne Mail, ich würde mich freuen!